UWAGA: W każdym aplecie konstrukcję można pomniejszyć scrollem myszy i przesunąć scroll+shift.
URGENT: In each applet, the structure can be reduced with the mouse scroll and moved with scroll + shift.
Mechanizmy przegubowe to ramiona (zazwyczaj w postaci metalowych prętów) połączone przegubami, względem których mogą się one swobodnie obracać, lub przesuwać. Stosowane są w urządzeniach mechanicznych i maszynach, przeznaczonych do uzyskania określonego celu.
Mechanizm Watta
Najprostszym urządzeniem przegubowym jest korbowód lokomotywy parowej, wymyślony w 1784 r. przez Jamesa Watta, z którego autor był bardziej dumny niż z silnika parowego, którego był również wynalazcą .
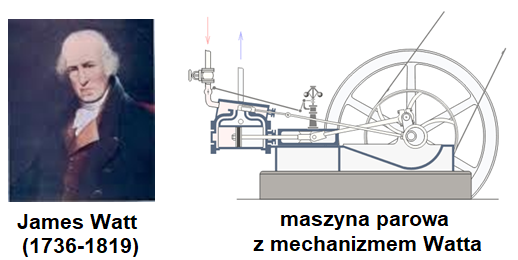
Poniżej widoczny jest aplet GeoGebry ilustrujący działanie mechanizmu Watta. Punkty A, B i C są przegubami ramion – odcinków AB i BC mechanizmu. Ruch posuwisty punktu A powoduje ruch obrotowy punktu C, który w parowozie przenoszony jest na jego koła toczące się po szynach.
Ta konstrukcja GeoGebry jest świetną etiudą dla młodych techników i uczniów liceum. Nie jest ona łatwa. Zaczynamy ją od konstrukcji okręgu. Obieramy na nim punkt C. Środek okręgu i tłoka leżą na jednej prostej. Odmierzamy cyrklem ustaloną długość ramienia. Okrąg ten przecina prostą przechodzącą przez środek koła i punkt A w punkcie B. W nim znajduje się sworzeń mechanizmu Watta. Kreślimy ramię AB. Odcinki BC i AB są tak dobrane, by tłok nie wyszedł poza obszar silnika parowego. Proponuję czytelnikowi, by ją samodzielnie wykonał.
A to parowóz, który dzięki mechanizmowi Watta może poruszać się po szynach kolejowych.
W którą stronę porusza się ten parowóz? W lewo, czy w prawo?
Mechanizm przegubowy Watta zasługuje na szczególną uwagę, gdyż zamienia on ruch punktu po okręgu na ruch innego punktu po prostej. Przypomina to nam inwersję w kole – przekształcenie które w pewnych sytuacjach zamienia odcinek na łuk okręgu i na odwrót. Dlatego też takie mechanizmy przegubowe nazywamy inwersorami.
W XIX wieku wielu matematyków poszukiwało innych inwersorów. Wymyślono ich dość sporo. Poznajmy dokładniej historię ich powstawania i ich zasady konstrukcyjne.
Inwersory Peaucelliera
Prekursorem inwersorów jest Charles Nicolas Peaucellier (1832-1913), francuski oficer i konstruktor urządzeń militarnych. Ukończył paryską École polytechnique i za swoje zasługi został promowany do stopnia generała. Stworzył on dwa inwersory. Pierwszy jego mechanizm składa się z ramion tworzących dwa romby OBPA i QBRA o wspólnej przekątnej AB. Poruszając wierzchołkiem A dostrzegamy, że punkty OQRP są współliniowe.
Drugi mechanizm Peaucelliera to modyfikacja pierwszego w którym usuwamy ramiona AP i BP większego rombu i konstruujemyokrąg o środku S po którym będziemy poruszać ogniwem Q. Wówczas punkt R kreśli prostą będącą obrazem tego okręgu w inwersji. Ten pomysł miał również niezależnie od Peaucelliera inny konstruktor inwersorów – Lipkin.
Inwersor Lipkina
W 1871 r. Jom Toy Lipman Lipkin (1851/75), litewski matematyk żydowskiego pochodzenia, uczeń słynnego matematyka Czebyszewa niezależnie od Peaucelliera odkrył podobny, aczkolwiek nawet prostszy inwersor i przedstawił go na Światowej Wystawie w Wiedniu w 1873 roku. Dostał on za ten wynalazek od rosyjskiego rządu dość pokaźną nagrodę finansową. Przegub jego inwersora wykonywał idealny ruch po prostej. Było to ważne ze względu na zachowanie szczelności tłoka w silnikach parowych, co nie do końca było osiągnięte przez Jamesa Watta. Chwyćmy myszą punkt B i poruszajmy nim. Co wykreśla wówczas punkt D?
Inwersor Harta
Haris Hart poszukując mechanizmów kreślących proste z wykorzystaniem inwersji odkrył dwa inwersory, z których jeden wykorzystuje 5 ramion, a drugi tylko cztery. Nasz inwersor Harta składa się z dwóch par ramion AD = BC = a oraz DP = CP = a. Ramię łączące oba najdłuższe ramiona AD i BC ma długość , a jego końce F i E znajdują się w odległości 3/4 od A i B. Punkt P kreśli wówczas symetralną punktów A i C.
Inwersor Kempego

Sir Alfred Bray Kempe (1849 – 1922) był matematykiem angielskim, uczniem Arthura Cayleya. On to w 1877 roku poczynił znakomite dzieło “ „How to draw a straight line” w którym zawarł teorię budowy inwersorów. Jego inwersor składa się z rombu OBCA i podobnych do siebie w pewnej skali deltoidów OBRA i RQPB. W trakcie poruszania punktem B punkt Q wykreśla prostą prostopadłą do AC.
Trysektor Pascala
 Blaise Pascal (1623-1662)
Blaise Pascal (1623-1662)
Jedną z trzech starożytnych konstrukcji niewykonalnych za pomocą cyrkla i linijki jest podział kąta na trzy przystające kąty (trysekcja kąta). Urządzenie mechaniczne pozwalające dokonać tę czynność w sposób niekonstrukcyjny (cyrkla i linijki) jest trysektor. Poniższa konstrukcja GeoGebry wyjaśnia w sposób dynamiczny konstrukcję jednego z trysektorów, którego autorstwo przypisuje się francuskiemu matematykowi i fizykowi – Blaise Pascal, mimo, że na podobnej zasadzie konstrukcję tę wykonał wcześniej Archimedes.
Trysektor Kopfa
Ten trysektor nie dzieli kąta na 3 części tak dokładny jak pascalowski, ale z pewnym przybliżeniem dzieli kąt CAB na trzy części wskazując 1/3 tego kąta jako kąt BDC.
Pantograf
To proste urządzenie przegubowe miało kiedyś ogromne znaczenie w rysowaniu map i planów oraz kopiowaniu obrazów, gdyż pozwalało powiększać lub pomniejszać w ustalonej skali rysunki, mapy itp. Zasada działania pantografu opiera się na jednokładności, której środek stanowi połączenie jego dłuższych przegubów BA i BC. Punktem P poruszamy po konturach obrazu, a punkt C kreśli jego kopię. Zawsze można włączyć lub wyłączyć ślad kopiującego punktu. Spróbujmy wykonać kopię Mona Lizy.
Mechanizm dzielący
Poniższa konstrukcja GeoGebry jest podobna do pantograu, ale zmienia kształt kopiowanego obrazu. Można to sprawdzić kreśląc punktem różne obiekty począwszy od odcinka i okręgu a kończąc na wielokątach, elipsach i innych figurach.
Wykreślajmy różne figury i obserwujmy, kształt ich kopii. W jakim przekształceniu kreślone obiekty przechodzą po ich skopiowaniu?
Mechanizm gamma Czebyszewa
 Pafnutyj Czebyszew (1821-1894)
Pafnutyj Czebyszew (1821-1894)
Pafnutyj Czebyszew, wybitny matematyk rosyjski znany był z poszukiwania praktycznych zastosowań matematyki. Mechanizmy przegubowe które projektował miały być do czegoś przydatne. Tak też się stało. Zaczął od najprostszego mechanizmu zwanego mechanizmem gamma który posłużył mu do badania, jak zmiany jego parametrów wpływają na kształt krzywych które wykreślały wybrane jego przeguby.
Poniższy aplet GeoGebry ilustruje dynamiczny obraz tego mechanizmu. Sworznie A i B mechanizmu są punktami stałymi, natomiast długości przegubów możemy ręcznie regulować zmieniając końce odcinków r=|BP| i R=|AS|=|SP|=|MS|. Czytelnik może poeksperymentować zmieniając parametry r i R.
Czy można je tak dopasować, by punkt M mechanizmu gamma kreślił prostą,…. okrąg,…. elipsę?
Stopochod
Kolejnymi mechanizmami stworzonymi przez Czebyszewa są mechanizmy przegubowe imitujące chód człowieka i chód konia. Każdy z nich nazwał autor stopochodem. Powstały one na bazie mechanizmu gamma. Zostały pokazane na Światowej Wystawie w Paryżu w 1878 r. Poniżej przedstawione są kolejno stopochod 1 (chód człowieka) i stopochod 2 (chód konia). Zauważmy w budowie stopochodów symetrię osiową segmentów konstrukcji.
[
Wycieraczki samochodowe
Wycieraczki samochodowe działają również dzięki użyciu mechanizmu przegubowego. Ruch obrotowy silnika wycieraczki (obracający się stale w jedna stronę) zostaje zamieniony na ruch ramion mechanizmu z których ostatnie to już sama wycieraczka. Chwyćmy myszą punkt obracający silnik i obserwujmy pracę wycieraczki.
Suwak obrotowy
Bardzo praktycznym jest mechanizm przegubowy, który podobnie jak inwersor zamienia ruch po okręgu na ruch posuwisty. Np. obrót silnika powoduje przesuwanie się obiektu po płaskiej powierzchni. Poruszaj myszą punkt P i obserwuj przesuwanie się klocka.
Kafar
Kolejnym przegubem mechanicznym, zbudowanym na bazie mechanizmu gamm Czebyszewa jest kafar – urządzenie do wbijania pali w ziemi lub w dnie rzeki. Tu mechanizm gamma obraca tak przeguby, by ramię poruszające się wzdłuż pionowej linii poruszało młot uderzający we wbijane pale.